
Adams (Automatic Dynamic Analysis of Mechanical Systems) is a virtual prototype analysis software developed by Mechanical Dynamics Inc. The model estabilished in Adams are proved to be nonlinear and more real. I am planning to established a mechanical system in Adams and design a controller in simulink. By combining two software to do simulation test to verify controller’s performance.
Model in Adams
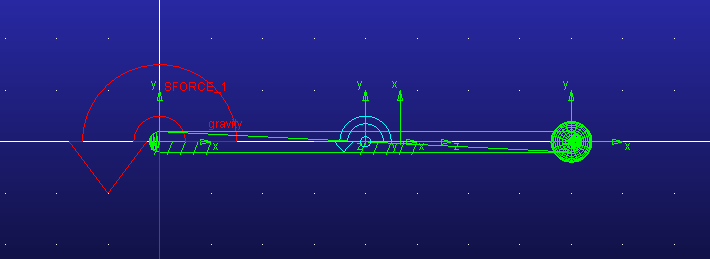
Using adams to establish a eccentric connecting rod mechanism with constraints
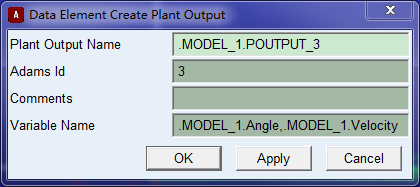
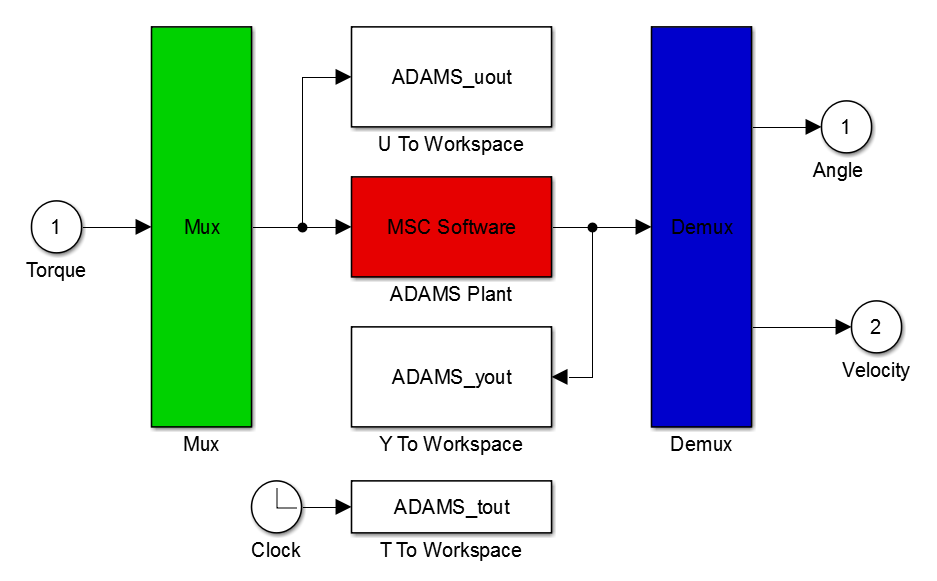
Then choose Torque as input signal (Control Signal), then choose Angel and Velocity as output signal (System State).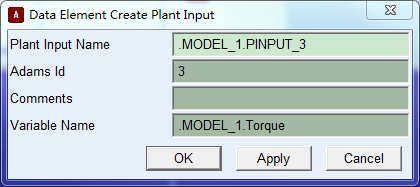
Packaging and export the mechanism as a nonlinear one-input and two-output system.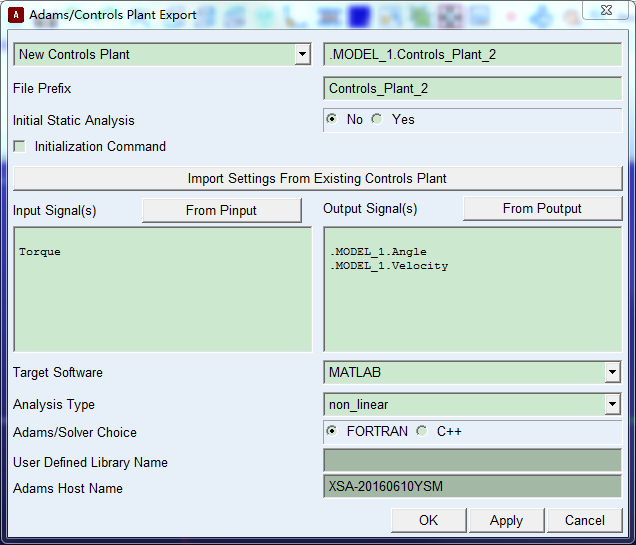
Export this model to Simulink and test it.
Controller in Simulink
Because the model in adams is a nonlinear system. So I design a PID controller, which is insensitive to model.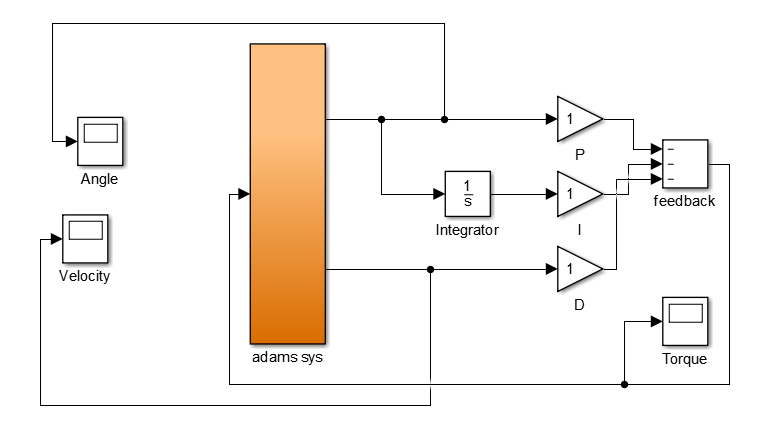
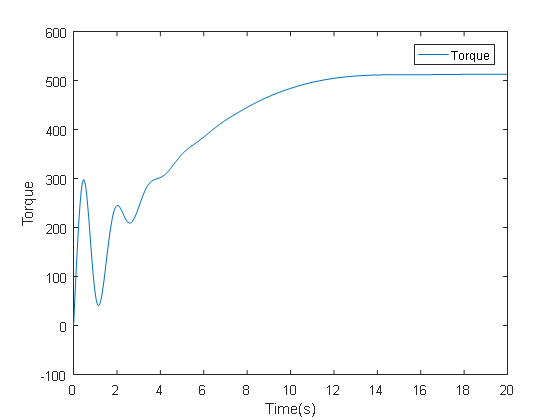
The joint simulation is carried out. The aim is holding the mechanism in a fix position
Joint Simulation Results
Observed in Adams, the mechanism is n a fix position: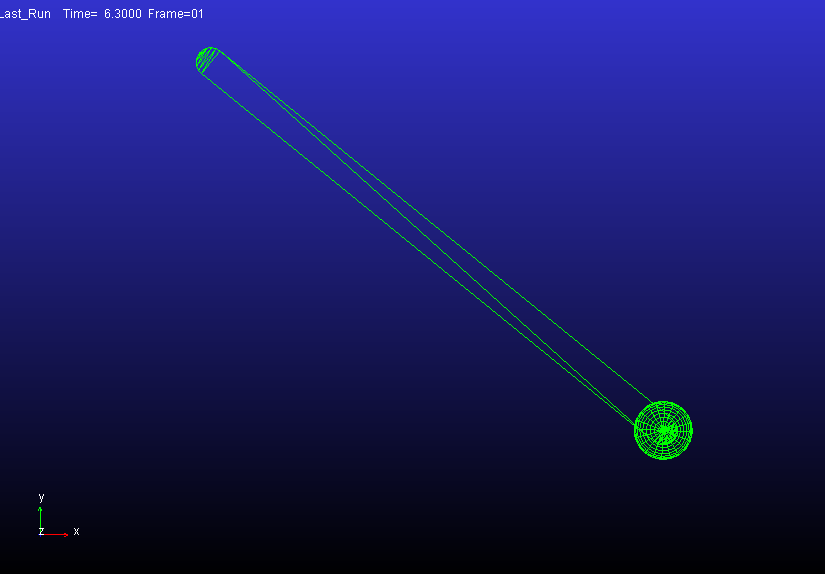
Observed in Simulation, the system responses are shown: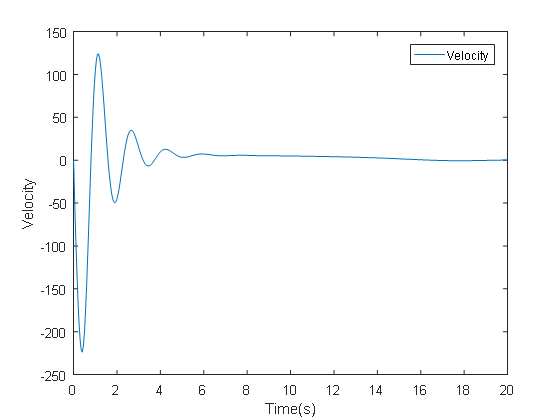
An interesting attempt, please contact me if you have problem in it.